闭环伺服系统方案设计,位置检测传感器
发布时间:2019-02-28 点击数:2238
当系统精度要求较高或负载较大时,开环伺服系统往往满足不了要求,这时应采用闭环或半闭环控制的伺服系统。
从控制原理上讲,闭环控制与半闭环控制是一样的,都要对系统输出进行实时检测和反馈,并根据偏差对系统实施控制。
两者的区别仅在于传感器检测信号位置的不同,因而导致设计、制造的难易程度不同及工作性能的不同,但两者的设计与分析方法是基本上一致的。
闭环伺服系统结构复杂,设计难度大,成本高,尤其是机械系统的动态性能难于提高,系统稳定性难于保证。因而除非精度要求很高时,一般应采用半闭环控制方案。目前大多数数控机床和工业机器人中的伺服系统都采用半闭环控制。
(二)执行元件的选择
直流伺服电动机、交流伺服电动机或伺服阀控制的液压伺服马达作为执行元件。
(三)检测反馈元件的选择
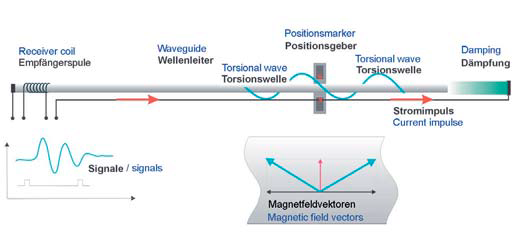
常用的位置检测传感器有旋转变压器、感应同步器、码盘、光电脉冲编码器、光栅尺、磁尺等。
①被测量为直线位移,应选尺状的直线位移传感器,如光栅尺、磁尺、直线感应同步器等。
②被测量为角位移,应选圆形的角位移传感器,如光电脉冲编码器、圆感应同步器、旋转变压器、码盘等。
从控制原理上讲,闭环控制与半闭环控制是一样的,都要对系统输出进行实时检测和反馈,并根据偏差对系统实施控制。
两者的区别仅在于传感器检测信号位置的不同,因而导致设计、制造的难易程度不同及工作性能的不同,但两者的设计与分析方法是基本上一致的。
一、系统方案设计
(一)闭环或半闭环控制方案的确定
当系统精度要求很高时,应采用闭环控制方案。闭环伺服系统结构复杂,设计难度大,成本高,尤其是机械系统的动态性能难于提高,系统稳定性难于保证。因而除非精度要求很高时,一般应采用半闭环控制方案。目前大多数数控机床和工业机器人中的伺服系统都采用半闭环控制。
(二)执行元件的选择
直流伺服电动机、交流伺服电动机或伺服阀控制的液压伺服马达作为执行元件。
(三)检测反馈元件的选择
常用的位置检测传感器有旋转变压器、感应同步器、码盘、光电脉冲编码器、光栅尺、磁尺等。
①被测量为直线位移,应选尺状的直线位移传感器,如光栅尺、磁尺、直线感应同步器等。
②被测量为角位移,应选圆形的角位移传感器,如光电脉冲编码器、圆感应同步器、旋转变压器、码盘等。
在位置伺服系统中,为了获得良好的性能,往往还要对执行元件的速度进行反馈控制,因而还要选用速度传感器。交、直流伺服电动机常用的速度传感器为测速发电机。目前在半闭环伺服系统中,也常采用光电脉冲编码器,既测量电动机的角位移,又通过计时而获得速度。